Research
Nonlocal Continuum Models for Oscillatory Media: Dynamics of Phase Equations
New findings in biology and neuroscience pave the way for research on spatially coupled, nonlocal phase models and organization of oscillatory media.

Read the latest from
Research
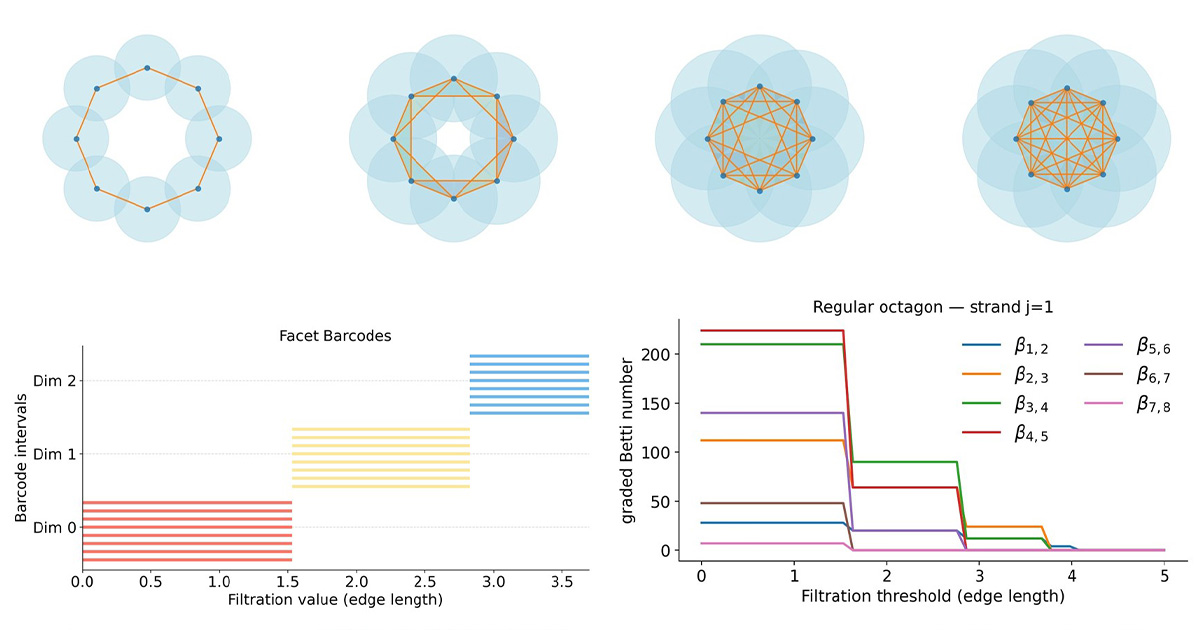
Commutative Algebra Meets Data Science: A New Paradigm in Mathematical Artificial Intelligence
Guo-Wei Wei explores the evolution of commutative algebra and the multiscale viewpoint of mathematical problems that it offers.

Conferences and Events
Strengthening SIAM’s Northern and Central California Research and Development Community at NCC25
Sherry Li, Andy Nonaka, and Stefan M. Wild highlight the successes of the 2nd annual SIAM Northern and Central California Sectional Conference.
The Casa Matemática Oaxaca Workgroup on Collective Social Phenomena present guiding principles for responsible modeling in the social sciences.
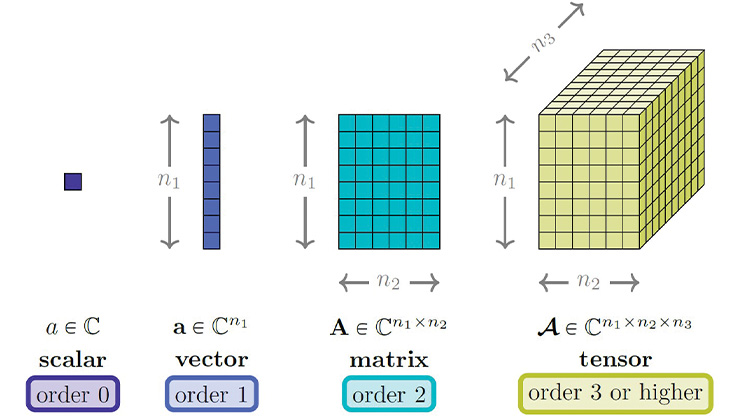
Elizabeth Newman explains data analysis’ ability to extract interpretable features from data using singular value decomposition and tensors.
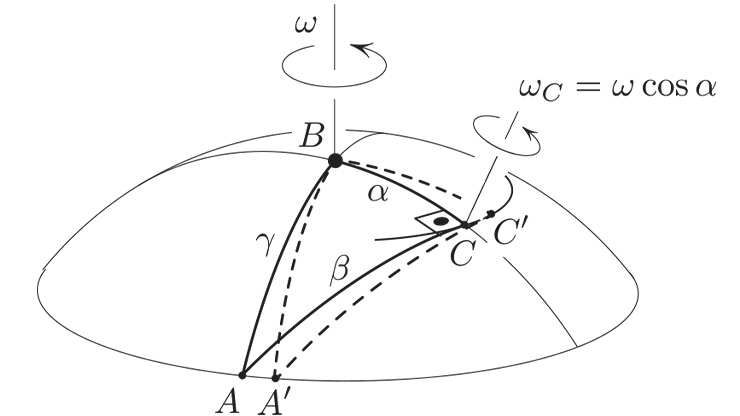
In his latest installment of “Mathematical Curiosities,” Mark Levi uses visuals to apply the Pythagorean theorem to a unit sphere.

Science Policy
#MathSciOnTheHill Advocacy Event Unites Hundreds of Mathematicians in Washington, D.C.
Jonas Actor and Emily Evans reflect on their experiences at #MathSciOnTheHill while communicating the importance of funding for mathematics.
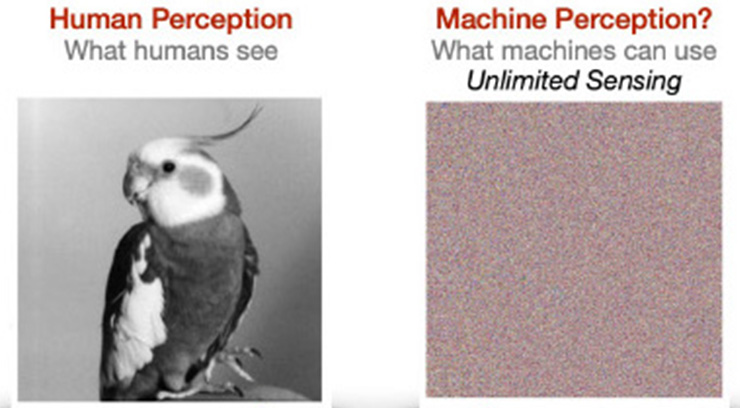
Ayush Bhandari explains how unlimited sensing harnesses quantization noise from traditional digitization methods to achieve clearer reconstructions.
Christoph Börgers explains why teaching mathematics without the "coercion" of conventional grading might encourage long-term interest in the subject.

The SIAM Equity, Diversity, and Inclusion Change Agents reflect on their experiences and discuss the outcomes of this special initiative.

High-fidelity digital lung models illuminate the effects of various elements on intrapulmonary airflow and predicted tissue deformation.
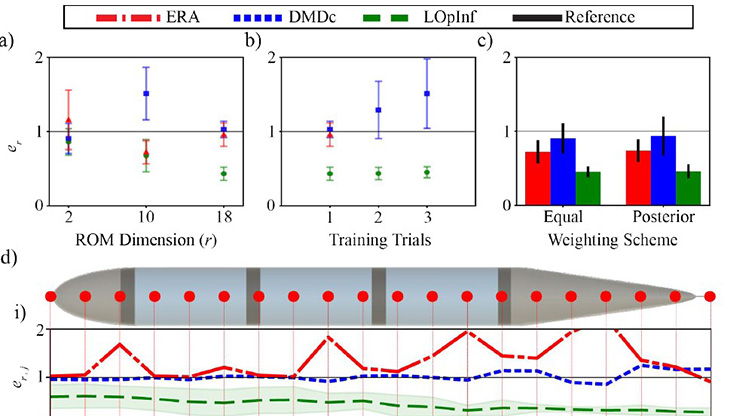
Boris Kramer and Michael Tolley present a data-driven model to track the movements of soft swimming robots that can mimic biological systems.

Congratulations to the SIAM prize recipients who will be recognized at PP26 in early March!
Stay Up-to-Date with Email Alerts
Sign up for our monthly newsletter and emails about other topics of your choosing.
