
An Inverted Pendulum: Defying Gravity (and Intuition)
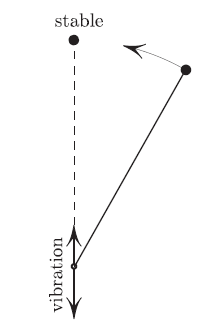
If the pivot of the pendulum (Figure 1) is vibrated vertically with a sufficiently high frequency, then the pendulum becomes stable in its upside-down position. This striking phenomenon, discovered and demonstrated by Stephenson in 1908 [6] and rediscovered in the 1950s, is often referred to as Kapitsa’s effect. The Stephenson-Kapitsa phenomenon explains the workings of the Paul trap; W. Paul received the 1989 Nobel Prize in physics for his invention of the particle trap now carrying his name [5].
Wishing to observe the Kapitsa effect directly, I had originally planned to build a device to vibrate the pivot but fortunately realized, before spending time and money, that I have this device at home. The resulting demonstration can be seen in this video.
The inverted pendulum was V.I. Arnold’s favorite demonstration; he used an electric shaver which has a reciprocating arm inside.
Standard explanations via averaging theory, or by computation of special cases such as in [1], are not intuitive. Here instead is a geometrical/intuitive explanation. In a nutshell, stability is due to the centrifugal force of a non–existent constraint, as explained below.
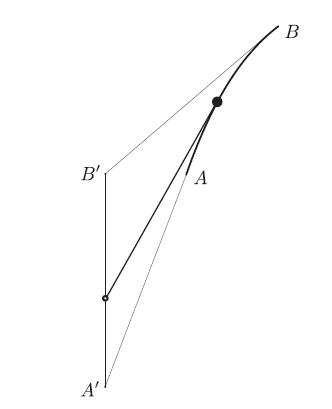
Figure 2 shows the pivot oscillating between two points (the amplitude is greatly exaggerated in this figure). We assume that the pivot’s acceleration is very large (thus so is the frequency); this means that the rod is under great tension or compression for most of the period. This great force acting upon the bob is aligned with the direction of the rod. As the leading order approximation, we assume that the bob actually moves in the direction of this force. This assumption forces the bob to travel in an arc \(AB\) of a tractrix, i.e. the pursuit curve. 1
To summarize, we constrained the bob to an arc \(AB\). This constraint is somewhat innocent since it does not interfere with the huge push–pull force of the rod acting on the bob. Now the mass constrained to the curve pushes with a centrifugal force \(mkv^2\) against the constraint, Figure 4; here \(k\) is the curvature of the tractrix. This push is towards the top, suggesting that the top equilibrium is stable if this force overcomes gravity, i.e. if
\[\overline {mkv^2}>mg \enspace \sin \theta, \qquad (1) \]
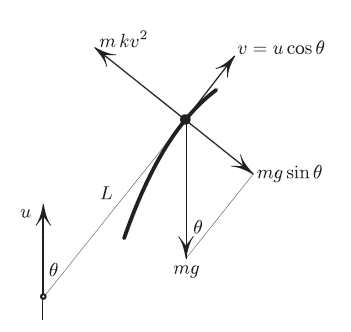
where the bar denotes the average over the period; the meaning of the remaining quantities is clear from Figure 4. To translate (1) into a useful criterion, we substitute \(k=\theta /L + o(\theta)\), \(v=u+o(\theta^2)\), and obtain,2 for small \(\theta\):
\[\overline{u^2}>Lg, \qquad (2)\]
the linearized stability criterion (see [3] for more details). Although this non–rigorous calculation looks suspiciously easy, it does give exactly the same result as the formal derivation due to Kapitsa, as reproduced in Landau and Lifshitz [2] and almost a page long. Incidentally, (2) turns out to be equivalent to the stability condition \( \vert {\rm det}\; F \vert <2\) of the Floquet matrix \(F\), providing a physical interpretation of this condition in terms of the centrifugal force of a non–existent constraint. To conclude, and as a side remark, a purely topological explanation of stability of the inverted pendulum, in a different regime, can be found in [4].
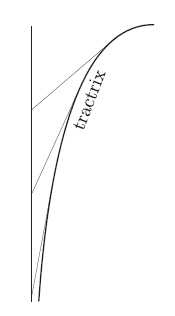
1 The tractrix is defined by the property that all the tangent segments connecting it to a straight line have the same length, Figure 3.
2 making an additional assumption of small amplitude, allowing us to treat \(k\) as a constant along the short arc of the tractrix.
References
[1] Arnold, V.I. (1992). Ordinary Differential Equations. Berlin: Springer-Verlag.
[2] Landau, L.D. & Lifshitz, E.M. (1976). Mechanics. New York: Pergamon Press.
[3] Levi, M. (1999). Geometry and physics of averaging with applications. PhysicaD, 132, 150-164.
[4] Levi, M. (1988). Stability of the inverted pendulum – a topological explanation. SIAM Review, 30, 639–644.
[5] Paul, W. (1990). Electromagnetic traps for charged and neutral particles. Revs. Mod. Phys., 62, 531-540.
[6] Stephenson, A. (1908). On a new type of dynamical stability. Manchester Memoirs, 52, 1-10.
About the Author
Mark Levi
Professor, Pennsylvania State University
Mark Levi (levi@math.psu.edu) is a professor of mathematics at the Pennsylvania State University.
Stay Up-to-Date with Email Alerts
Sign up for our monthly newsletter and emails about other topics of your choosing.
