
Feynman’s Flying Saucer Explained
To quote Richard Feynman [2]:
“I was in the cafeteria and some guy, fooling around, throws a plate in the air. As the plate went up in the air I saw it wobble, and I noticed the red medallion of Cornell on the plate going around. It was pretty obvious to me that the medallion went around faster than the wobbling. I had nothing to do, so I start to figure out the motion of the rotating plate. I discover that when the angle is very slight, the medallion rotates twice as fast as the wobble rate — two to one.1 It came out of a complicated equation! Then I thought, ‘Is there some way I can see in a more fundamental way, by looking at the forces or the dynamics, why it’s two to one?’ I don’t remember how I did it, but I ultimately worked out what the motion of the mass particles is, and how all the accelerations balance to make it come out two to one.”
Feynman later writes that “The [Feynman] diagrams and the whole business that I got the Nobel Prize for came from that piddling around with the wobbling plate” [2].
Here I offer a quick explanation of Feynman’s observation. Figure 1 gives a summary.
Watching a Star from the Flying Saucer
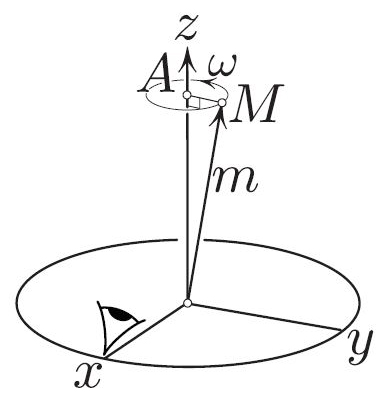
The angular momentum of the plate in flight is fixed because the torque that acts on the plate is zero, neglecting the effect of air. Let \({\bf m}= (m_x, m_y, m_z)\) be the expression of the angular momentum in the \(xyz\)-frame that is glued to the plate (see Figure 1). As the plate wobbles, \(\bf{m}\) changes; we will show that \(\bf{m}\) spins around the \(z\)-axis as in Figure 1, where \(\omega\) actually turns out to be precisely the angular velocity \(\omega_z\) of the plate’s spin around the \(z\)-axis. This fact is of independent interest and demonstrates two roles of \(\omega\): (i) the rate of the plate’s spin (as viewed by someone on the ground), and (ii) the rate of \(\bf{m}\)'s spin around the \(z\)-axis in the eye of the observer stuck to the plate. Postponing the proof that \(\bf{m}\) moves like in Figure 1, here is an explanation of Feynman’s observation.
Explaining the 1:2 Spin-to-wobble Ratio
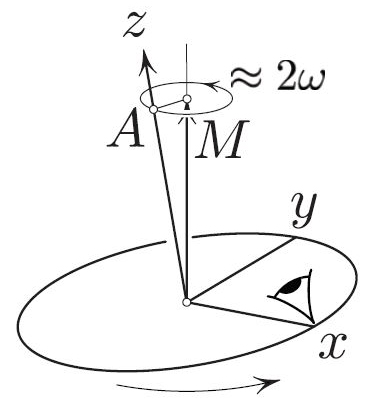
Segment \(AM\) in Figure 1 rotates at the angular velocity \(\omega \equiv \omega _z\) relative to the plate, according to the claim in the previous paragraph. And the plate itself rotates with an angular velocity of magnitude \(\approx \omega\) and closely aligned with the angular momentum if the wobble is small (see Figure 2). The sum of these angular velocities is \(\approx 2 \omega\); it is the angular velocity of the \(z\)-axis around the fixed direction of the angular momentum in the ground frame. This completes the explanation of the 1:2 ratio; it remains to be proven that \(\bf{m}\) indeed moves as Figure 1 indicates.
Explaining the Motion of \(\bf{m}\) in Figure 1
The plate’s angular velocity \(\boldsymbol{\omega}\) is related to \(\bf{m}\) via \(\boldsymbol {\omega} = {\bf I} ^{-1} {\bf m}\), where \({\bf I} = \hbox{diag} (I_x, I_y, I_z) \) is the tensor of inertia whose diagonal entries are the moments of inertia with respect to the corresponding axes. Since the moment of inertia around the \(z\)-axis is twice that around the diameter, we have \({\bf I} = I_z\hbox{diag}(\frac{1}{2} ,\frac{1}{2} ,1)\). Now \(\bf{m}\) satisfies Euler’s equation
The derivation of \((1)\) is immediate by a creative application of the familiar formula \(\bf {v } = \omega \times {\bf r}\). Indeed, to the observer on the flying saucer, the surrounding space is rotating with angular velocity \(- \boldsymbol{\omega}\) and the tip of the angular momentum vector is like a particle affixed to the surrounding space. The apparent velocity of this “particle” is thus given by
\[\bf {\dot m} = ( -\boldsymbol{\omega}) \times {\bf m}, \]
which amounts to Euler’s equations \((1)\) upon substitution \(\boldsymbol{\omega} = {\bf I} ^{-1} {\bf m}\) (a standard derivation of Euler’s equation in [1] or [3], for example, takes a little over half a page).
Finally, Euler’s equations \((1)\) become
\[ \begin{equation} \left\{ \begin{array}{l} \dot m_x =- m_y(m_z/I_z) \\ \dot m_y = \ \ m_x(m_z/I_z) \\ \dot m_z=0\end{array} \right. \end{equation}. \tag2 \]
Now \(m_z/I_z = \omega_z \) is exactly the angular velocity around the \(z\)-axis, and is constant according to the last equation. Based on the first two equations, the vector \((m_x,m_y )\) executes circular motion with angular velocity \(\omega _z\). This completes the explanation of \(\bf{m}\)’s motion that is sketched in Figure 1.
1 Actually it is the other way around; the wobble is twice as fast as the spin.
The figures in this article were provided by the author.
References
[1] Arnold, V.I. (1989). Mathematical Methods of Classical Mechanics. New York, NY: Springer-Verlag.
[2] Feynman, R. (1997). Surely You’re Joking, Mr. Feynman! New York, NY: W.W. Norton & Company.
[3] Goldstein, H. (1980). Classical Mechanics. Reading, MA: Addison-Wesley.
About the Author
Mark Levi
Professor, Pennsylvania State University
Mark Levi (levi@math.psu.edu) is a professor of mathematics at the Pennsylvania State University.
Stay Up-to-Date with Email Alerts
Sign up for our monthly newsletter and emails about other topics of your choosing.
