
Measuring Curvature with a Bike
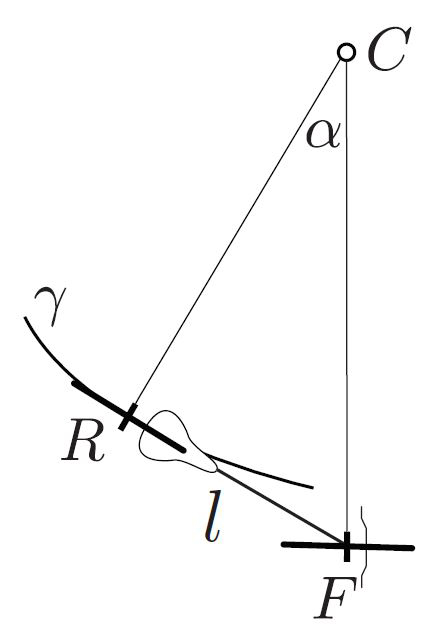
The following nice fact can be found in [1] (in a slightly different formulation than here): The center \(C\) of curvature of a bike’s rear track (see Figure 1) lies at the intersection point of the two axles’ extensions, i.e., of the normals to the front and rear tracks.
I speak here of a mathematician’s bike, namely of a fixed length segment \(RF\) whose front \(F\) moves along a prescribed path and whose rear \(R\) has velocity vector constrained to the line \(RF\). [1] posed the problem of finding a geometrical proof for this neat fact. I offer such a proof/explanation here, along with a few additional observations.
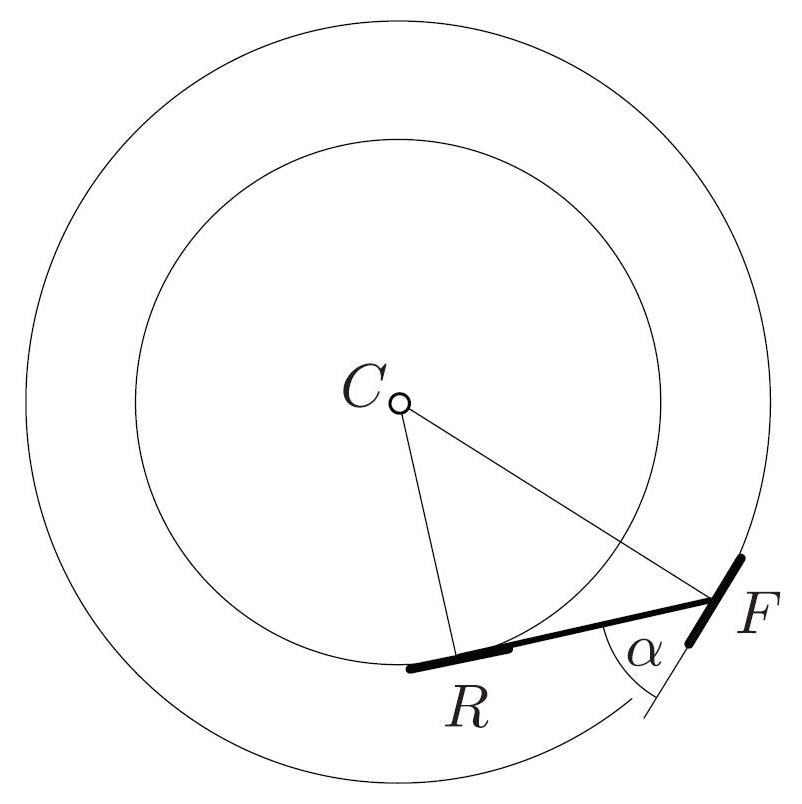
To see without calculation why this curious fact holds, imagine first locking the steering angle \(\alpha\) to a fixed value, as in Figure 2. With the steering locked, the wheels will trace out two concentric circles with the center at the intersection point of the two axles, thus proving/explaining1 the claim for \(\alpha=\textrm{const}\).
It remains to remove the constancy assumption, i.e., to explain why curvature \(\kappa\) does not in fact depend on the variation of \(\alpha\) but only on \(\alpha\) itself (and on the length \(l=RF\)).
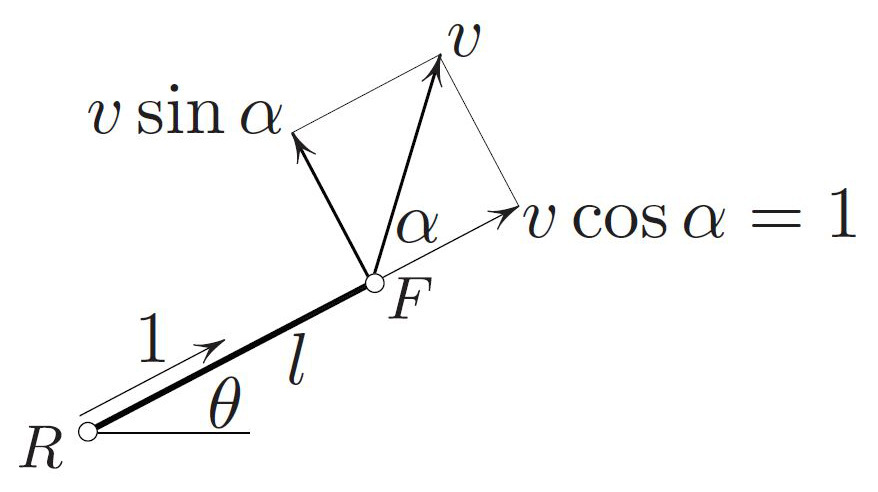
Referring to Figure 3, where \(R\) moves with speed \(1\) (treating the arc length \(s\) as the time), we have
\[ \kappa = \frac{d\theta}{ds} = \frac{v \sin \alpha}{l} = \frac{\tan \alpha}{l}, \tag1 \]
proving the independence of \(\kappa\) on \(d\alpha/ds\) and thus justifying the original claim. Actually, the claim also follows directly from \((1)\), which yields \(\kappa ^{-1} = l \cot \alpha\) and coincides with \(RC = l \cot\alpha\) from Figure 1.
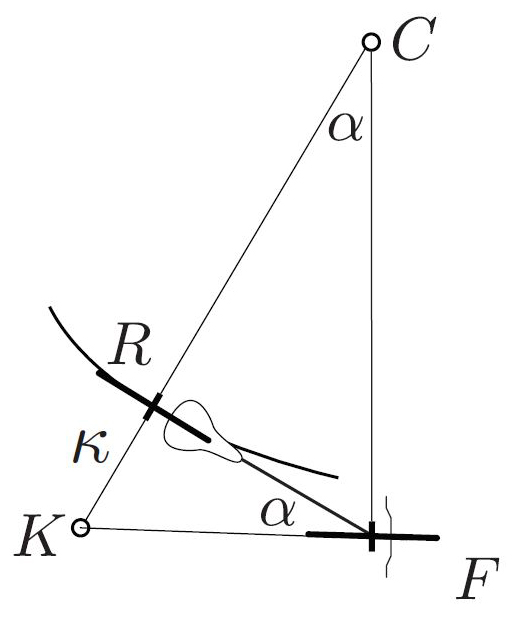
I was planning to stop here while writing this note, but then began to wonder if there is a way to see the curvature \(\kappa\) itself, rather than the radius of curvature \(RC = 1/ \kappa\). Figure 4 answers this question:
\[\kappa = KR,\]
assuming \(l=1\) for simplicity. Indeed, the triangles \(\Delta FRC\) and \(\Delta KRF\) are similar, so that (taking \(l=RF=1\)),
\[\frac{KR}{1} =\frac{1}{RC}, \quad \ \ \hbox{i.e.} \ \ \quad KR\cdot RC=1. \]
Thus, \(KR= RC ^{-1} = (\kappa ^{-1} ) ^{-1} = \kappa\), as claimed.
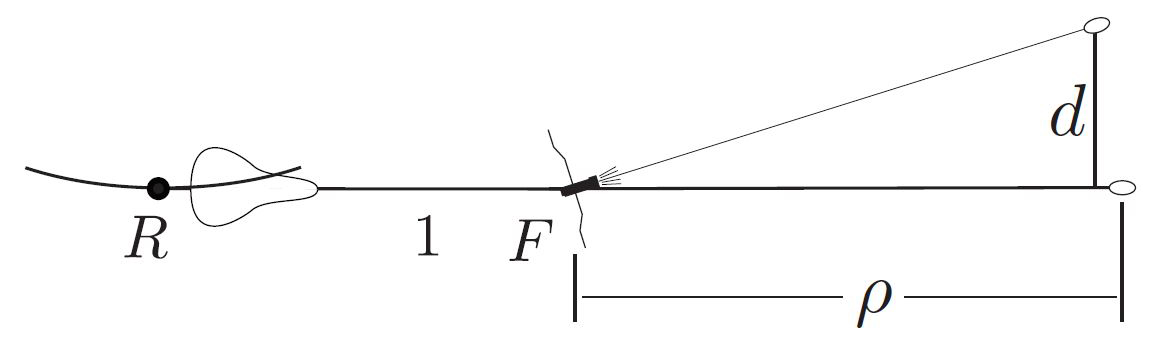
Eyeballing \(\kappa\) while riding the bike would force one to look backwards (and with \(K\) passing from one side of the line \(RF\) to the other, doing so becomes particularly difficult and embarrassing). Here is a safer way, which avoids twisting the neck (or breaking it, if \(v\) is large). Imagine mounting a light—or better, a laser pointer—on the handlebars; then the deviation \(d\) of the light spot cast on the ground (see Figure 5) determines \(\kappa\) (for \(l=1\)) via
\[ \kappa=d/ \rho + O(d^3).\]
From now on I will probably always think of \(\kappa\) when riding a bike at night.
1 Proofs which also explain why probably deserve a special name, something like “exproof.”
The figures in this article were provided by the author.
References
[1] Alexander, J.C. (1984). On the Motion of a Trailer-Truck. SIAM Review, 26(4), 579-580.
About the Author
Mark Levi
Professor, Pennsylvania State University
Mark Levi (levi@math.psu.edu) is a professor of mathematics at the Pennsylvania State University.
Stay Up-to-Date with Email Alerts
Sign up for our monthly newsletter and emails about other topics of your choosing.
