
Parabola of Safety and the Jacobian
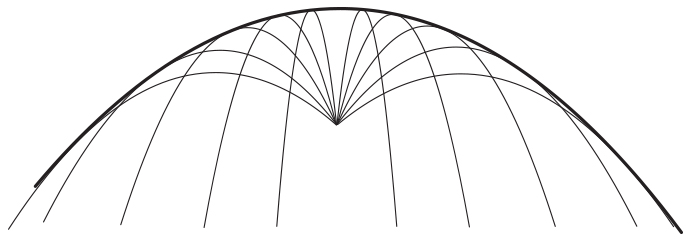
I would like to describe an alternative (to the standard) way of finding the parabola of safety, i.e., the boundary of the set of points vulnerable to a projectile launched with a given initial speed \(v\) from a fixed point (see Figure 1).
A conventional derivation goes by maximizing—over all launching angles—the elevation y above a given x. The result happens to be
\[y =\frac{v ^2 }{2g} - \frac{g}{2v ^2} x ^2. \tag1\]
Alternatively, one can employ the standard way to find an envelope of the family of parabolic trajectories, parametrized by the angle of launch.
I would like to present perhaps an unconventional approach which has some advantages, one of them being added geometric insight.
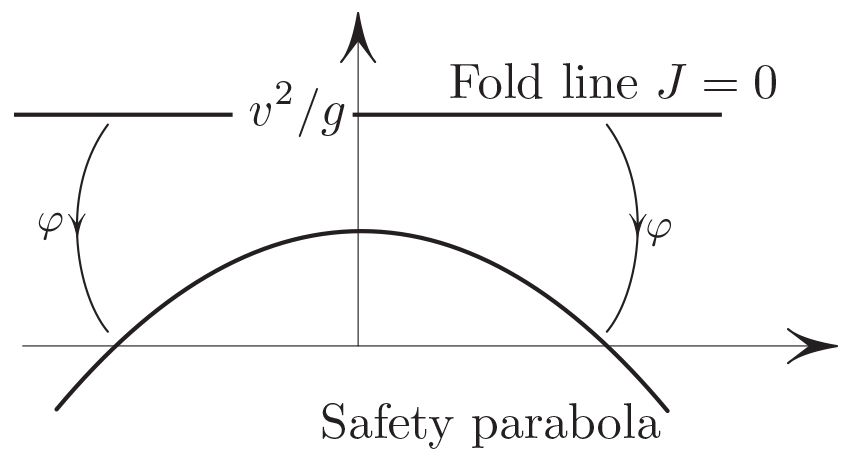
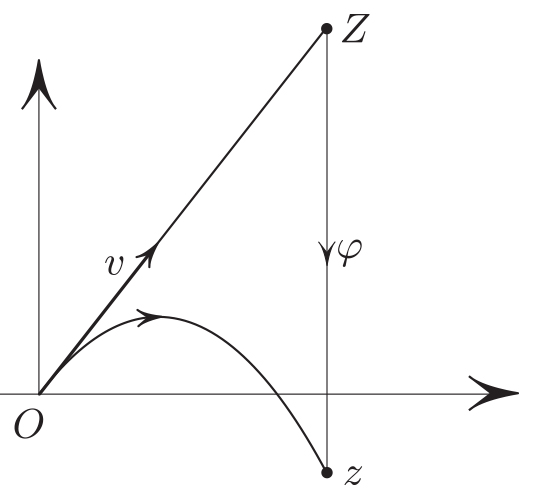
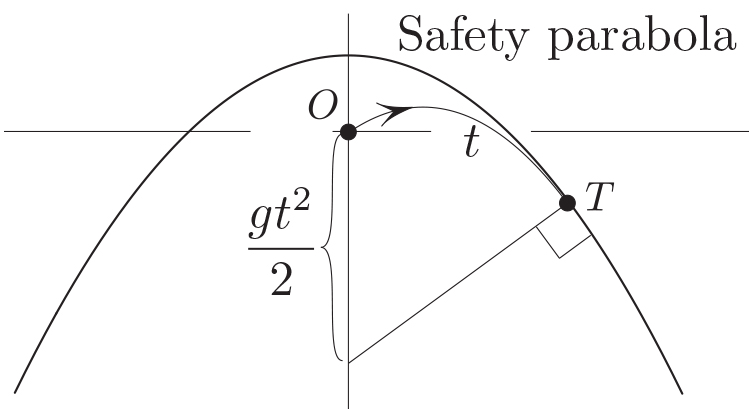
The key idea is to consider the “sagging map” \(\varphi:= Z\mapsto z\), illustrated in Figure 2 and defined as follows. For any given \(Z\in {\mathbb R} ^2\), we consider the gravity-free motion with initial speed \(v\) (fixed throughout), which hits \(Z\). Let \(z\) be the point hit by a gravity-laden trajectory (with the same initial velocity) in the same travel time as \(Z\) is hit. In short, \(\varphi\) assigns the gravity-laden destination \(z\) to a gravity-free destination \(Z\), the two trips sharing the initial conditions and travel time. Under the map \(\varphi\), straight lines sag to become parabolas. The main point (explained subsequently in more detail) is this: the zero set of the Jacobian of \(\varphi\) is mapped under \(\varphi\) onto the safety parabola (see Figure 3). This zero set happens to be a straight line.
Denoting \(Z= (X,Y), \ z=(x,y)\), the map \(\varphi\) is given by \(x=X, \ y= Y- \frac{gt ^2}{2}\), where \(t^2 = (X^2 + Y ^2 )/ v ^2\), so that \(\varphi\) is given by
\[ \left\{ \begin{array}{l} x = X \\[3pt] y=Y-\frac{g}{2v ^2 } (X ^2 + Y ^2) .\end{array} \right. \tag2\]
The Jacobian \(J\) of \(\varphi\) computes to be
\[J = 1 - \frac{gY}{v^2},\]
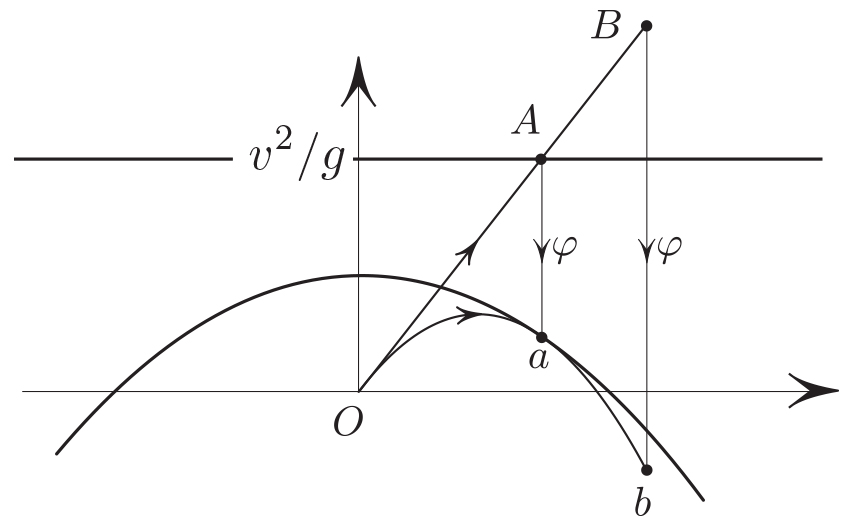
and \(J=0\) gives \(Y= v ^2 /g\), the horizontal straight line at twice the maximum rise of the projectile. And the safety parabola \((1)\) is simply the image of this line under \(\varphi\) (see Figure 3). Inserting \(Y=v ^2 /g\) into \((2)\) confirms this. What justifies the statement of Figure 3? In Figure 4, the ray \(OB\) and the line \(J=0\) are transversal at \(A\). But their images are tangent at \(a= \varphi (A)\) thanks to the vanishing of \(J\), which explains why the image of \(J=0\) is the envelope of the family of trajectories.
As a direct elementary observation, apart from Jacobians, \(\varphi\) is a composition of two simple maps: first, a fold around the line \(J=0\), namely \((x,y) \mapsto ( x, y-a y^2)\) \((\)with \(a= g /2 v ^2\), see \((2))\), followed by the parabolic shear \((x,y) \mapsto (x,y-a x ^2)\), see \((2)\). Under the first map, the rays from the origin turn into parabolas tangent to the same horizontal line \(y = v ^2 /2g\). Under the second map, the latter line becomes a parabola, to which the images of the trajectories are tangent — hence, the safety parabola.
As a concluding item, Figure 5—together with its caption—offers a puzzle.
The figures in this article were provided by the author.
About the Author
Mark Levi
Professor, Pennsylvania State University
Mark Levi (levi@math.psu.edu) is a professor of mathematics at the Pennsylvania State University.
Stay Up-to-Date with Email Alerts
Sign up for our monthly newsletter and emails about other topics of your choosing.
