
Understanding the Gliding Stability of Falling Plates
Many types of biological and man-made flight systems can glide beautifully through fluids; birds cruise, fish coast, and even toys like paper airplanes cut smoothly through air as long as the physical conditions are just right (see Figure 1). But what does “just right” mean in a mathematical sense? Can we predict whether a particular wing or plate that is immersed in some fluid will glide steadily at a constant angle? What contributing factors—such as relative mass, buoyancy, or mass distribution—can stabilize or destabilize the emergent flight patterns of thin wings, foils, and plates? Our recent work seeks to answer these and other related questions [4].
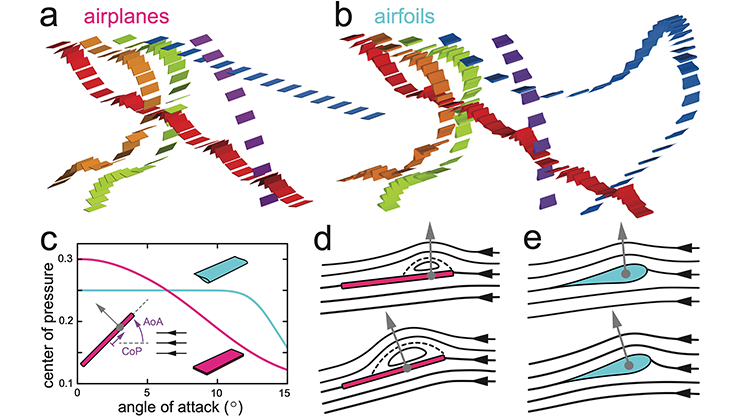
![<strong>Figure 1.</strong> Real-world flight systems are embedded in different locations within a flight parameter space. Examples include a flying squirrel, a paper airplane, a flounder, and a butterfly, among others. The selected examples vary in size and composition, occupying either air or water. Dimensionless parameters \(I,\) \(M,\) and \(W\) respectively denote a given system’s moment of inertia, inertial mass, and buoyancy-corrected gravitational mass. Figure courtesy of [4].](/media/dfohj12p/figure1.jpg)
The passive flight of thin structures is a canonical problem in fluid dynamics that dates back to Scottish physicist and mathematician James Clerk Maxwell’s discussions of tumbling motions in the 1800s [3]. Since then, numerous mathematicians, engineers, and biologists have studied free motion under gravity to better understand the underlying principles that govern the multitude of different possible flight patterns [1, 5, 6]. These patterns include the aforementioned gliding, which involves steady motion at a fixed trajectory; back-and-forth fluttering; phugoid-like bounding; broadside-on descent; and aperiodic or chaotic motion, among several others (see Figure 2). How and why does a given body achieve a particular flight pattern as it falls passively through fluid under gravity?
Quasi-steady models (QSMs)—which express aerodynamic forces and torques in terms of instantaneous dynamical quantities like speed, angle of attack, and angular velocity—have significantly advanced our understanding of the passive flight problem. Although such models inherently neglect unsteady forces and wake interactions—which may be important in some cases—they do successfully capture the rich array of flight patterns that are available to thin plates at intermediate Reynolds numbers [2, 6]. Our latest work [4] builds upon the newest QSM of this ilk [2] by updating the treatment of rotation-induced lift, introducing a dimensional analysis of the model, and providing an extensive stability analysis that determines relevant factors that collectively dictate a given plate’s ability to glide steadily through fluid. Importantly, the plates in this study can have inhomogeneous mass distributions — i.e., their centers of mass may lie forward or backward along the plate, rather than strictly at the geometric center. This allowance lends an extra degree of freedom to the problem and renders the model more applicable to a broad array of flight systems.
![<strong>Figure 2.</strong> Sample trajectories produced by the quasi-steady passive flight model. Each trajectory involves a different parameter range, while all initial conditions are identical. For example, the light and dark blue colors respectively indicate steady gliding and diving terminal states. Other colors designate various unsteady terminal states; fluttering is red, progressive fluttering is orange, bounding is green, and meandering is pink. Gray indicates aperiodic and apparently chaotic motions with bouts of tumbling. Figure courtesy of [4].](/media/beihheyp/figure2.jpg)
As evidenced by Figure 2, our QSM generates a variety of steady and unsteady flight trajectories that are embedded in a parameter space that involves three dimensionless quantities: inertial mass \(M\); buoyancy-corrected gravitational mass \(W\); and center of equilibrium \(\ell_{CE}\), which is the buoyancy-corrected center of mass of the plate. Notably, it is very difficult to predict where gliding occurs in this parameter space by mere visual inspection; the blue trajectories seem scattered throughout the area without a clear pattern. Without further analysis, it is thus impossible to determine the type of terminal mode that a given plate will achieve for a certain set of parameters.
We performed a linear stability analysis of the flight model to understand why gliding flight only occurs in specific regions of the parameter space. This analysis revealed several factors that contribute to the stability of gliding flight. For instance, the location of the plate’s center of mass is extremely important when determining stability, as only select ranges allow for gliding flight. Moreover, the plate’s gravitational and inertial masses play distinct and quite interesting roles in determining stability. Finally, higher moments of inertia tend to broadly decrease the possibility of steady gliding flight. Our model, and the stability analysis thereof, explores these and other factors of gliding stability at length.
The model also uncovered a novel flight pattern: a periodic unsteady flight state that snakes downward, which we dubbed “meandering.” The pink trajectory in Figure 2 illustrates this state. Our analysis of the model predicts that the new flight pattern, which involves smooth turns wherein the plate inverts as it travels downward, may only be possible for very massive plates whose centers of mass are displaced moderately away from their geometric centers. In the future, we intend to confirm the existence of this flight state, which will serve as an opportunity to test our QSM’s predictions against experiments and direct numerical simulations.
Ultimately, the passive motions of plates are the perfect setting against which to develop mathematical models that accurately describe the unique aerodynamics of small-scale flight. We believe that these models could comprise the core of future flight simulations, further our understanding of biological flight, and guide the design of biomimetic vehicles.
Olivia Pomerenk delivered a contributed presentation on this research at the 2024 SIAM Annual Meeting (AN24), which took place last year in Spokane, Wash. She received funding to attend AN24 through a SIAM Student Travel Award. To learn more about Student Travel Awards and submit an application, visit the online page.
SIAM Student Travel Awards are made possible in part by the generous support of our community. To make a gift to the Student Travel Fund, visit the SIAM website.
References
[1] Dickinson, M.H., Lehmann, F.-O., & Sane, S.P. (1999). Wing rotation and the aerodynamic basis of insect flight. Science, 284(5422), 1954-1960.
[2] Li, H., Goodwill, T., Wang, Z.J., & Ristroph, L. (2022). Centre of mass location, flight modes, stability and dynamic modelling of gliders. J. Fluid Mech., 937, A6.
[3] Maxwell, J.C. (1853). On a particular case of the descent of a heavy body in a resisting medium. Camb. Dublin Math. J., 9, 115-118.
[4] Pomerenk, O., & Ristroph, L. (2025). Aerodynamic equilibria and flight stability of plates at intermediate Reynolds numbers. J. Fluid Mech., 1014, A24.
[5] Ristroph, L., Bergou, A.J., Guckenheimer, J., Wang, Z.J., & Cohen, I. (2011). Paddling mode of forward flight in insects. Phys. Rev. Lett., 106(17), 178103.
[6] Wang, Z.J. (2016). Insect flight: From Newton's law to neurons. Ann. Rev. Condens. Matter Phys., 7, 281-300.
About the Authors
Olivia Pomerenk
Postdoctoral research fellow, Brown University
Olivia Pomerenk is postdoctoral research fellow at Brown University, where she develops mathematical models and computational simulations of problems in fluid dynamics. She earned her Ph.D. in mathematics in 2025 from New York University’s Courant Institute of Mathematical Sciences, under the supervision of Leif Ristroph.

Leif Ristroph
Associate professor, New York University
Leif Ristroph is an applied mathematician, experimental physicist, and associate professor of mathematics at New York University's (NYU) Courant Institute of Mathematical Sciences, where he directs the Applied Mathematics Laboratory and studies problems in fluid dynamics and classical mechanics. He was a U.S. National Science Foundation postdoctoral fellow at NYU and earned his Ph.D. in physics from Cornell University.

Related Reading
Stay Up-to-Date with Email Alerts
Sign up for our monthly newsletter and emails about other topics of your choosing.
