
Vibro-impact Energy Harvesting Via Computer-assisted Analysis
Energy harvesting is the process of capturing some form of existing energy from the environment and converting it into electrical energy. One means of doing so is through vibration-based energy harvesting, which can source energy from human activities like walking and running and from the cyclic or random loading of buildings, bridges, and other structures or machines. Energy harvesting devices typically include an automated component that captures mechanical energy and transforms it into electrical energy. While existing research suggests that nonlinear systems may harvest energy more efficiently than linear systems [6], relatively few studies have thoroughly explored the dynamic mechanisms that enable successful nonlinear energy harvesting.
![<strong>Figure 1.</strong> The vibro-impact energy harvesting device, its dynamical model, and return map construction. <strong>1a.</strong> Experimental setup. The transparent capsule is attached to a table that vibrates horizontally from left to right. <strong>1b.</strong> The corresponding vibro-impact model. The ball moves freely within the capsule, which is enclosed by deformable membranes on both ends. The capsule is positioned at an angle \(\beta\) relative to the horizontal plane and is excited by an external harmonic excitation \(\hat{F}(\omega\tau+\psi)\). <strong>1c.</strong> Time series for the displacement of the top and bottom membranes (dashed black lines) and motion of the ball (red line). The green stars and blue dots respectively indicate the impacts at the bottom and top membranes. <strong>1d.</strong> Three-dimensional (3D) surfaces of the first return maps for the bottom-top-bottom impact sequence \(\partial B \rightarrow \partial T \rightarrow \partial B\) (magenta) and bottom-bottom impacts \(\partial B \rightarrow \partial B\) (black). The blue horizontal arrows between 1c and 1d relate the sequences to the corresponding 3D surfaces. Figure 1a courtesy of Henrik Sykora and Figures 1b-1d adapted from [1].](/media/og1jvarn/figure1.jpg)
The classical vibro-impact pair under external forcing offers an effective method for harvesting energy [7]. This system comprises a capsule and an inner ball whose impacts deform flexible dielectric polymer membranes that act as capacitors and are located at the capsule’s ends (see Figure 1a). The impacts change the membranes’ capacitance and allow the harvest of energy from periodic or random forcing. The power from a vibro-impact harvester is directly proportional to the impact velocity, and the energy yield can be significantly higher—by an order of magnitude—than that of piezoelectric or electromagnetic techniques.
To design an efficient vibro-impact harvester and maximize its energy output, we must understand its global dynamics. Although local stability analysis of vibro-impact systems has garnered considerable attention in recent years [5], the exploration of these systems’ global dynamics and bifurcations remains a complex challenge. Classical global stability methods for smooth dynamical systems often have limited applicability to nonsmooth systems [2-4]. More broadly, global stability methods for nonautonomous, nonsmooth systems are still relatively rare.
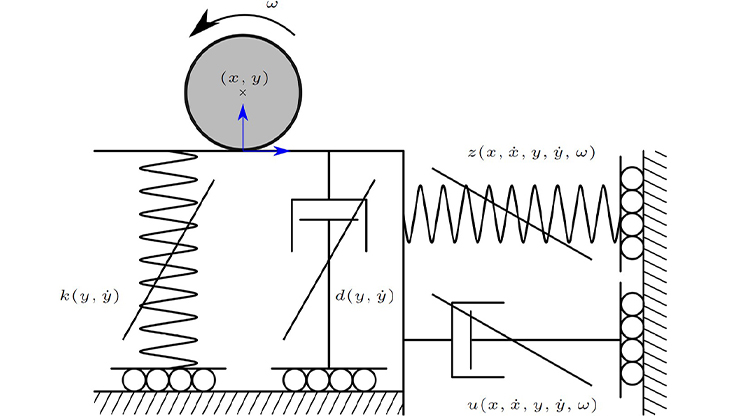
Here, we present a novel computer-assisted approach [1] that permits us to study the global dynamics of a vibro-impact pair. Our system consists of an externally forced capsule and an internal freely moving ball; neglecting the friction between the ball and capsule, the ball’s motion is driven by both gravity and its impacts with the membranes at the capsule’s ends (see Figure 1b). The capsule itself is driven by an external harmonic excitation \(\hat{F}(\omega\tau+\psi)\) with period \(2\pi/\omega\). Using Newton’s second law of motion, the dynamics between impacts are
\[\frac{d^2X}{d\tau^2}=\frac{\hat{F}(\omega\tau+\psi)}{M}, \qquad \frac{d^2x}{d\tau^2}=-g\sin\beta,\]
where \(X(\tau),M\) and \(x(\tau),m\) are the absolute displacement and mass for the capsule and ball, respectively. If \(M \gg m\) and the impact time is negligible compared to the other time scales in the model, we can conveniently introduce the following two elements: (i) a dimensionless relative displacement \(Z(t)=X(t)-x(t)\) that is scaled by a normalizing factor, and (ii) a relative velocity \(\dot{Z}(t)\) between the capsule and ball. Doing so allows us to focus on the system dynamics as a whole, rather than the separate motions of the ball and capsule.
The instantaneous impact condition is then
\[Z_j=\pm\frac{d}{2}, \quad \dot{Z}^+_j=-r\dot{Z}^-_j,\]
where the superscripts \(-\) and \(+\) respectively signify the state of the ball before and after impact [5]. The subscript \(j\) indicates the impact’s index and the parameter \(r\) is the restitution coefficient: a quantitative measure of the membrane’s elasticity. The parameter \(d\) is the normalized dimensionless capsule length in terms of the amplitude and frequency of forcing, dimensional capsule length, and capsule mass; it thus contains several important features of the energy harvesting system.
By combining the impact conditions with the equations of motion between impacts, we can utilize exact nonsmooth maps for impact velocity \(\dot{Z}_k\) and impact phase \(\psi_k\) to capture the dynamics [5]. These maps are coupled transcendental equations that prevent explicit global stability of the system dynamics. Nevertheless, the nonsmooth dynamics suggest that short sequences of returns to the bottom of the capsule \(\partial B\) define the building blocks for return maps. The return maps represent distinct families of behaviors whose compositions yield any transient or attracting behavior, providing important characterizations of the states that translate into different levels of energy harvesting.
Our return maps do not align with standard map choices, such as Poincaré, stroboscopic, all impacts, or all returns to a particular state. Instead, they are based on the varied sequences of impacts that do or do not occur before the system returns to a specific impact state. This innovative perspective efficiently partitions the state space into a small number of regions, from which we can easily identify attracting and transient behavior and subsequently determine the anticipated energy harvesting sequences. For example, Figure 1c illustrates the division between sequences \(\partial B \rightarrow \partial B\) and \(\partial B \rightarrow \partial T \rightarrow \partial B\) that yields a small number of surfaces for \(\dot{Z}_{k+1}\) and \(\psi_{k+1}\) in terms of \(\dot{Z}_k\) and \(\psi_k\) (see Figure 1d). These surfaces divide the state space into a small number of regions with distinguishing features that are useful for global stability results.
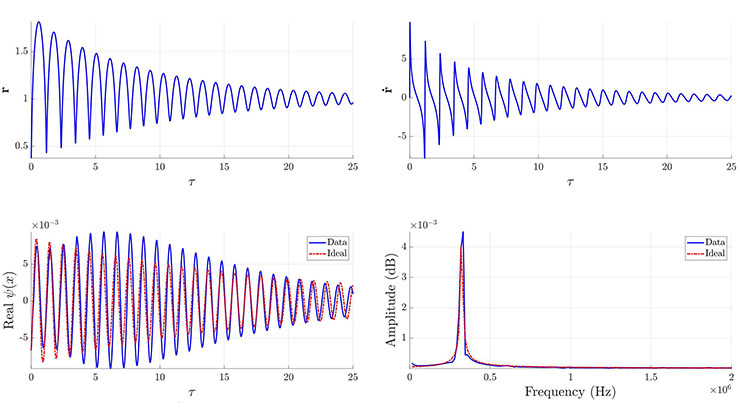
![<strong>Figure 2.</strong> Approximation of the exact two-dimensional (2D) return map and its reduction to a one-dimensional (1D) auxiliary map for the analysis of vibro-impact chaotic dynamics. <strong>2a.</strong> The 2D map is projected onto the phase plane of the approximate velocity \(v_k\). The curves represent maps for distinct state space regions in Figure 1d, and the dark solid line indicates a typical trajectory that reaches an attracting domain of the chaotic attractor. <strong>2b.</strong> The 1D auxiliary map is derived from the 2D return maps using bounds for a potentially attracting region (in gray). Figure adapted from [1].](/media/m2bktip4/figure2.jpg)
We approximate the surfaces that define the exact return maps for \(\dot{Z}_k\) and \(\psi_k\) in each region of the state space to construct a piecewise smooth composite map for approximate velocity \(v_k\) and approximate relative impact phase \(\phi_k\) (see Figure 2a). This framework is highly computationally efficient because it reduces the primary task to the construction of return maps for short-time realizations of impact pairs across the space of initial conditions, which is divided into a small set of dynamical building blocks. The method seeks to calculate a single return that consists of only a few impacts, which significantly reduces computational demand when compared to approaches like basin of attraction calculations or cell mapping. Our framework hence provides an efficient alternative to traditional longtime simulations for the derivation of flow-defined Poincaré maps and analysis of global dynamics in limit cycle or chaotic systems.
The form of these composite maps facilitates cobweb analysis, which characterizes the nonsmooth vibro-impact dynamics via simple return maps for impacts on one end of the capsule (rather than via the full compositions of map sequences, which are not return maps). Cobweb analysis identifies attracting regions in the phase planes to yield the range of values of the relative impact velocity \(\dot{Z}_k\), on which the net energy output relies. Figure 2a demonstrates the ability of cobweb analysis to capture this range; the shaded regions depict two-dimensional (2D) return maps that cannot be visualized in the projection. But for some strongly transient regions, the 2D return map dynamics are captured by a “separable” approximation: a pair of one-dimensional (1D) return maps that separate the dynamics of \(v_k\) and \(\phi_k\). Solid curves in the figure represent the 1D return maps, which facilitate transparency for the overall dynamics.
Cobweb analysis motivates a valuable definition of auxiliary maps on the regions for different building block behaviors. For regions with attracting dynamics, the auxiliary map is conservatively based on extreme bounds (e.g., the gray shaded region in Figure 2a) and can thus bound the attracting domain (see Figure 2b) that contains all of the system’s nontrivial attractors.
The auxiliary maps simplify the 2D return maps into a set of 1D equations that separately track the dynamics of approximate velocity \(v_k\) and phase \(\phi_k\). Auxiliary maps also capture the worst-case scenario and provide conservative bounds on the maximum and minimum range of \(v_k\) and \(\phi_k\) at each iteration. Figure 2b illustrates the worst-case scenario of cobwebbing (dashed line) and shows the maximum and minimum values of \(v_k\) after one iteration of the 1D map. This action defines the bounds for the size of the attracting domain in \(v_k\) (yellow interval \(\mathcal{A}_v\)), which directly relates to the energy output of the chaotic regime in Figure 2a.
Our computer-assisted method reduces nonsmooth, impacting systems into a composite piecewise smooth map that offers a robust framework for the study of global dynamics. Here, we focus on parameter regions that are associated with energetically favorable states in vibro-impact energy harvesting systems. Since our approach employs generic return maps that comprise short sequences of impacts that decompose the full dynamics, it is adaptable to a wide range of nonsmooth systems.
The versatility of our technique enables its application to realistic external environments and makes it a valuable tool for future exploration. Ongoing research will refine these theoretical frameworks and methodologies to deepen our collective understanding of vibro-impact dynamics and ultimately develop energy harvesting solutions that are resilient to realistic and stochastic external conditions.
This article is based on [1] and Lanjing Bao’s minisymposium presentation at the 2023 SIAM Conference on Applications of Dynamical Systems (DS23), which took place in Portland, Ore., in May 2023. Bao received funding to attend DS23 through a SIAM Student Travel Award. To learn more about Student Travel Awards and submit an application, visit the online page.
SIAM Student Travel Awards are made possible in part by the generous support of our community. To make a gift to the Student Travel Fund, visit the SIAM website.
Acknowledgments: This work was supported by the U.S. National Science Foundation under collaborative grants CMMI-2009329 and CMMI-2009270, as well as the U.K. Engineering and Physical Sciences Research Council under grant EPSRC EP/V034391/1.
References
[1] Bao, L., Kuske, R., Yurchenko, D., & Belykh, I. (2025). Computer-assisted global analysis for vibro-impact dynamics: A reduced smooth maps approach. SIAM J. Appl. Dyn. Syst. To be published.
[2] Belykh, I., Kuske, R., Porfiri, M., & Simpson, D.J.W. (2023). Beyond the Bristol book: Advances and perspectives in non-smooth dynamics and applications. Chaos, 33(1), 010402.
[3] Di Bernardo, M., Budd, C.J., Champneys, A.R., & Kowalczyk, P. (2008). Piecewise-smooth dynamical systems: Theory and applications. In Applied mathematical sciences (Vol. 163). London, U.K.: Springer.
[4] Luo, A.C.J., & Guo, Y. (2013). Vibro-impact dynamics. West Sussex, U.K.: Wiley.
[5] Serdukova, L., Kuske, R., & Yurchenko, D. (2019). Stability and bifurcation analysis of the period-T motion of a vibroimpact energy harvester. Nonlinear Dyn., 98(3), 1807-1819.
[6] Stephen, N.G. (2006). On energy harvesting from ambient vibration. J. Sound Vib., 293(1-2), 409-425.
[7] Yurchenko, D., Lai, Z.H., Thomson, G., Val, D.V., & Bobryk, R.V. (2017). Parametric study of a novel vibro-impact energy harvesting system with dielectric elastomer. Appl. Energy, 208, 456-470.
About the Authors
Lanjing Bao
Ph.D. student, Georgia State University
Lanjing Bao is a Ph.D. student in applied mathematics and bioinformatics at Georgia State University.
Rachel Kuske
Professor, Georgia Institute of Technology
Rachel Kuske is a professor of mathematics at the Georgia Institute of Technology and a SIAM Fellow.

Daniil Yurchenko
Associate professor, University of Southampton
Daniil Yurchenko is an associate professor in the Institute of Sound and Vibration Research at the University of Southampton in the U.K.

Igor Belykh
Distinguished University Professor, Georgia State University
Igor Belykh is a Distinguished University Professor of Applied Mathematics in the Department of Mathematics and Statistics at Georgia State University.

Stay Up-to-Date with Email Alerts
Sign up for our monthly newsletter and emails about other topics of your choosing.
